

7.Multilocomotor的开发过程
为了帮助孩子在姿态得到控制的状态下获得移动经验,我们开发了新的移动机器。开发期间,我们用市场上可以买到的电动组合YAMAHA JW-2作为驱动器,进行了试作。但是驱动器非常庞大,没有低速的速度调节功能,所以作为移动器械使用是不可能的。再次研发的时候,将驱动器、控制系统、电池等小型化作为前提,进行了研讨。结果,我们采用了有菌制作所生产的电动组合。这套设备可以在0~1km/h范围内调节前进•后退、回旋速度,并且启动时的冲击力小。
Multilocomotor的试作机器非常小巧,长700mm、宽452mm、高400mm、总重量为24kg。这样,Multilocomotor不被限制在室内使用,可用于多种目的。
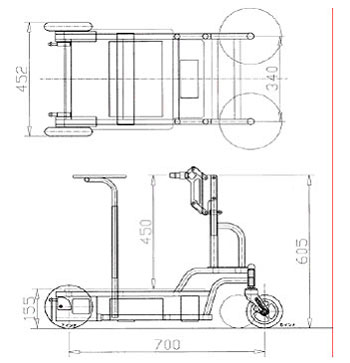
【Multilocomotor的设计图纸】

【制作成型的各种控制器】
金属的操纵杆因为手感不好(原始感觉)无法触摸。为此在操纵杆上缠上毛线,或套上塑胶套。
8.使用Multilocomotor获得移动经验的过程
导入Multilocomotor这一新的课题时,考虑了一下几点。
- Multilocomotor与PCSS构造相同,所以在孩子理解了与在PCSS上学会的姿态控制方法相同之前,在不开动电动单元的前提下,使用Multilocomotor重复以前做过的游戏,使其懂得Multilocomotor与PCSS的一致性。
- 为了提高其对操作Multilocomotor时获得的因果关系的理解,积极地让孩子在家里用鼠标操作电脑。
- 使用控制器的时候,由大人示范,通过视觉情报来促进孩子对自己行动结果的预测,进而提高孩子的适应性。
- 使用时间为一周一次,一次40分钟。
从导入期到操作期一共花了3个阶段 【开始导入Multilocomotor】 |
 【在Multilocomotor上扔套环】 |
 【使用Multilocomotor操作电脑】 |
 【第一次使用Multilocomotor】 |